LaTeX templates and examples — Two-column
Recent
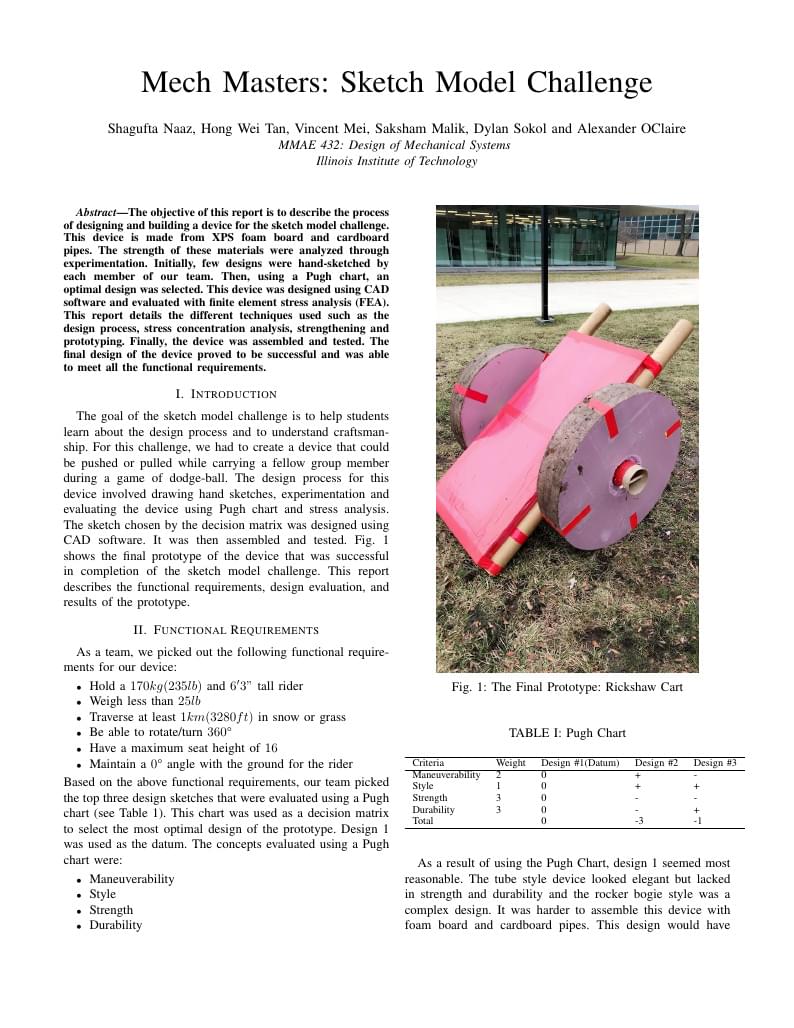
Design process of capstone senior "Sketch Model Challenge" project.
日本経営工学会 2021年 春季大会のWord版テンプレートをTEXに移植したバージョン

In this paper we will study an algorithm designed by Madgwick which is commonly used to determine the orientation of a quadcopter. The algorithm uses a group of accelerometers, gyroscopes and magnetometers integrated in what is called an IMU as input. Some differences have been found between the results obtained by the original paper and the implementation done by the author. Therefore, a thorough study has been made, finding a miscalculation in the equations. The results show a relative average error in the orientation of 1,44 ppm.

Laboratory where LEX is compared to C
Originally from http://www.oxfordjournals.org/our_journals/nar/for_authors/msprep_submission.html

The extended abstract template to be used by MEMEC students at IST (Technical University Lisbon) Original Author: Andre C. Marta Overleaf Port: Pedro Sá da Costa Template based of the Extended Abstract of Nuno Enes Area Cientifica de Mecanica Aplicada Aeroespacial Departamento de Engenharia Mecanica Instituto Superior Tecnico Created: Dec 2, 2011 Modified: Sept 20,2016

This LaTeX tutorial will introduce LaTeX, creating a .tex file, sections, body text, tables, figures, mathematical formulas, acknowledgements, and references.

This is the template for the UIST 2020 paper submissions. It is provided for your convenience by the UIST 2020 Program Chairs, as a template for submissions, and pre-loaded in Overleaf for ease of editing online. Please see the http://uist.acm.org/ page for more details on manuscript preparation.

Due to the widespread adoption of the internet and its services, protocols have been established and new ones arise every year. Either for securing connections, ciphering information or service authentication, protocols place an important part in network communications. The TCP/IP has become one of the ubiquitous protocol suites for secure communication, and therefore, a desirable target for covert information encapsulation. In this article, we will discuss the art of unauthorized data transfer - covert techniques - for data encapsulation in protocol data packets, emphasizing headers fields manipulation.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.