overleaf template galleryCommunity articles — Recent
Papers, presentations, reports and more, written in LaTeX and published by our community.

In this practice, the student will implement a four-bit counter using the 74LS193 Integrated circuit (IC), and the NE555 IC as clock signal.
for engineering intern. Created with the Medium Length Professional CV template.
Introduction to quantum mechanical effects and an implementation example of quantum key distribution
Modelo de CV para o português Adapted from the TwentySeconds CV template.
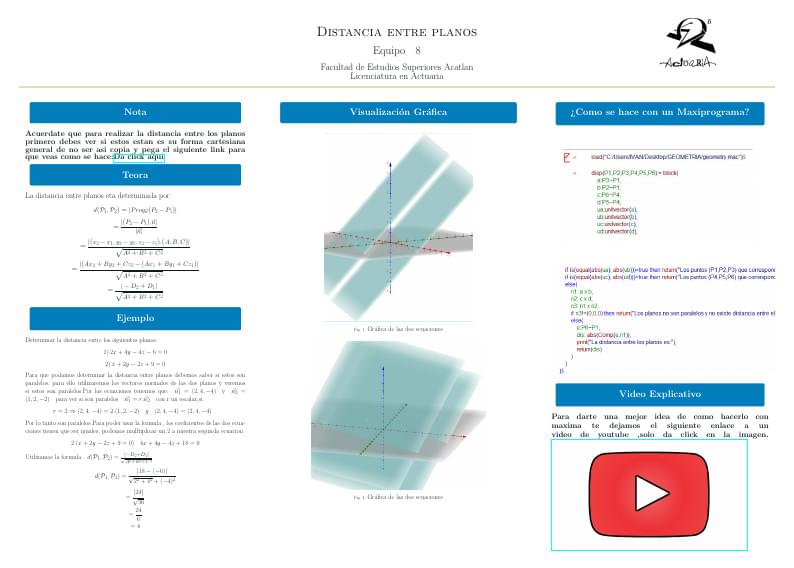
projecto geometria Acuerdate que para realizar la distancia entre los planos primero debes ver si estos estan es su forma cartesiana general de no ser asi copia y pega el siguiente link para que veas como se hace:Da click aqui
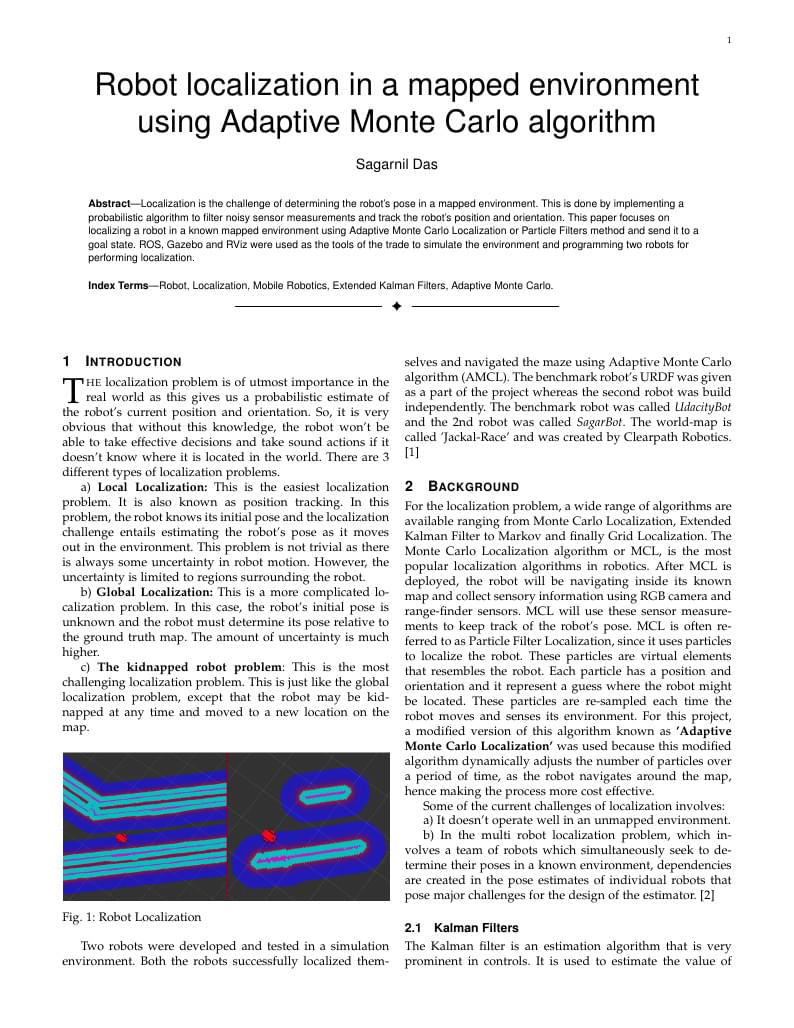
Localization is the challenge of determining the robot's pose in a mapped environment. This is done by implementing a probabilistic algorithm to filter noisy sensor measurements and track the robot's position and orientation. This paper focuses on localizing a robot in a known mapped environment using Adaptive Monte Carlo Localization or Particle Filters method and send it to a goal state. ROS, Gazebo and RViz were used as the tools of the trade to simulate the environment and programming two robots for performing localization.

Note on problem solving
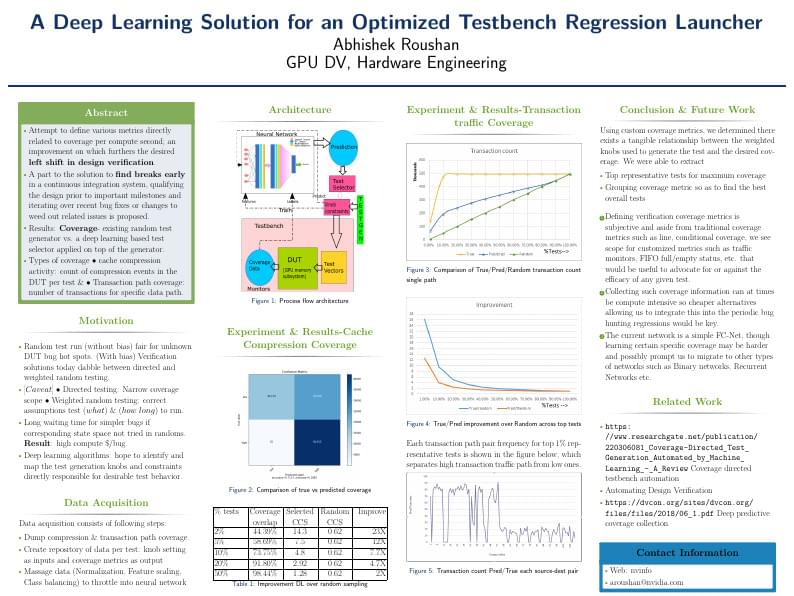
Attempt to define various metrics directly related to coverage per compute second; an improvement on which furthers the desired left shift in design verification. A part to the solution to find breaks early in a continuous integration system, qualifying the design prior to important milestones and iterating over recent bug fixes or changes to weed out related issues is proposed. Created with the Jacobs Landscape Poster LaTeX Template Version 1.0 (29/03/13)
Karisák.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.